Programmable Motion Control System
The Allegra series of motion controllers are stand-alone or host controlled, easy-to-use, plug-and-play and cost effective solutions for motion control applications. Each system integrates the power supplies, controller and motor drivers. These series support up to 4 axes of motion, 16 TTL / CMOS inputs, 16 TTL / CMOS outputs, 3 analog inputs, and optical encoder inputs. The command port is provided for stand-alone operation.
The system may be controlled in different ways; 1) Stand-alone In this mode, the controller does not need the PC to operate. The controller is programmed in a high level BASIC-like programming language. The code is developed, downloaded to the controller, run and saved in the controller's non-volatile memory using the supplied Integrated Development Environment (IDE). 2) Externally Controlled In this mode, the host sends a series of ASCII commandsto the controller via the RS-232 serial port. The controller processes and performs the incoming commands and responds with proper messages. 3) Control Panel The intuitive Control Panel allows the user to set-up the system quickly. The operator is able to move the mechanism to different positions by pressing the corresponding buttons of the Control Panel or using the joystick and/or trackball. The motion parameters are manually recorded in the control panel by typing the desired values in the corresponding fields, or may be read from an ASCII file.
The powerful programming instructions with more than 120 commands include motion control, configuration, input / output, program flow commands, 32-bit logical and mathematical operations, and other miscellaneous commands. Modes of motion include point-to-point positioning, jogging, contouring, electronic gearing, and electronic cam. These systems can also be operated using an analog joystick or a trackball. The speed of the motor is proportional to the tilt angle of the joystick or the rotational speed of the trackball. These series are also available without the micro-stepper drivers. The outputs from the system would be power, enable, step and direction signals. This configuration is suited to interface with the "integrated motor and drivers”.
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
Features Typical Applications
• Programmable, Teachable or Manual Control
2) Stand-alone, No PC Required to Operate
• Available also to Drive DC Servo, Brushless,
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
TECHNICAL DATA
Modes of Motion Dedicated Inputs
• Positive and Negative Limit Switches per Axis
• External Step and Direction Signals per Axis
Supported No. of Axes Dedicated Outputs
• Stepper, Single Phase or Three Phase
Brushless DC Motor Driver Outputs per Axis
Range of Motion Parameters General Purpose Digital Input / Output
• 8 TTL / CMOS Inputs, Optional 16 TTL /
• Acceleration: 40,000 - 40 Million Steps / sec2
• 8 TTL / CMOS Outputs, Optional 16 TTL /
Communication Interface Software General Purpose Analog Input
• Menu Driven, No Programming Required
General Specifications
• Offset Adjustment Potentiometer for Each
Joystick
• 22 General Purpose Variables, 32 Bits of
• Motor Speed Proportional to the Tilt Angle
Trackball Mechanical Stepping Motor Driver
Size: 10.0'' (250 mm) W X 10.8" (265 mm) D X 4.875" (124 mm )H
• Weight: 10 lbs (4.50 Kg) with 80-Watt Power
• 2 to 256 Micro-steps per Step Resolution
• Material: Aluminum, 0.09" (2.3 mm)
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
Power Supply DC and Three Phase Brushless Motor Driver
• Optional 160-Watt, +36 VDC at Full Load
• +20 VDC to up to +80 VDC Power Supply
• Optional 240-Watt, +48 VDC at Full Load
• Optional 400-Watt, +48 VDC at Full Load
Power Requirement
• Optional 500-Watt, +48 VDC at Full Load
• 110 VAC, 50 ~ 60 Hz or
• 220 VAC, 50 ~ 60 Hz or
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
PIN ASSIGNMENT AND DESCRIPTION X-MOTOR 8-pin Circular Connector
The X-axis motor should be connected to this connector.
STEPPING MOTOR BRUSHLESS DC MOTOR Y-MOTOR 8-pin Circular Connector
The Y-axis motor should be connected to this connector.
STEPPING MOTOR BRUSHLESS DC MOTOR
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
Z-MOTOR 8-pin Circular Connector
The Z-axis motor should be connected to this connector.
STEPPING MOTOR BRUSHLESS DC MOTOR W-MOTOR 8-pin Circular Connector
The W-axis motor should be connected to this connector.
STEPPING MOTOR BRUSHLESS DC MOTOR
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
COMMAND 9-pin DB-9, Male Connector
This port is used for stand-alone operation.
DESCRIPTION
Connecting this pin to system ground will stop motion on all axes.
Connecting this pin to system ground will run the code saved in the
RECALL-and-RUN *
Connecting this pin to system ground will continue the execution of the
code after execution of a PAUSE command.
This pin selects the state of the output ports on power-up or reset.
Placing a jumper between this pin and system ground will cause the
HI – LO *
state of the output ports to be high upon power-up or reset.
Connecting this pin to system ground will end the running program.
TERMINAL*
Connecting this pin to system ground will enable the terminal operation
Connecting this pin to system ground will disable the joystick upon
* A normally open switch should be placed between this pin and GND, if this operation is required. A 10 KOHM pull-up resistor is placed between all inputs and +5 VDC.
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
INPUT 9-pin DB-9, Male Connector This port is used to connect and read the state of a TTL / CMOS signal like a sensor, reed switch or other similar devices.
Related commands are IN, IFBIT and IFNOTBIT. Please refer to Operating and Programming Reference Manual.
DESCRIPTION Second Input DESCRIPTION
A 10 KOHM pull-up resistor is placed between all inputs and +5 VDC.
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
OUTPUT 9-pin DB-9, male Connector
This port is used to turn on or off other devices using a TTL / CMOS signal like an LED, solenoid, relay or other similar devices.
Related commands are OUT, SETBIT and CLRBIT. Please refer to Operating and Programming Reference Manual.
DESCRIPTION
CMOS Level Signal, 10 mA Sink and Source Capability, +5 VDC
CMOS Level Signal, 10 mA Sink and Source Capability, +5 VDC
CMOS Level Signal, 10 mA Sink and Source Capability, +5 VDC
CMOS Level Signal, 10 mA Sink and Source Capability, +5 VDC
CMOS Level Signal, 10 mA Sink and Source Capability, +5 VDC
CMOS Level Signal, 10 mA Sink and Source Capability, +5 VDC
CMOS Level Signal, 10 mA Sink and Source Capability, +5 VDC
CMOS Level Signal, 10 mA Sink and Source Capability, +5 VDC
All outputs are CMOS level signals, 10 mA sink and source capability at +5 VDC.
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
JOYSTICK 25-pin DB-25, Female Connector
This port is used to connect an analog joystick. If a joystick is not used, three analog signals may be connected to this port.
Related commands are RSTSX, RSTSY and RSTSZ. Please refer to Operating and Programming Reference Manual.
DESCRIPTION ANALOG-X ANALOG-Y HIGH-SPEED MEDIUM-SPEED LOW-SPEED W-SELECT ANALOG-Z
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
X-LIMITS 9-pin DB-9, Male Connector
The X-axis positive, negative and home switches should be connected to this port.
DESCRIPTION POS-LIMIT-X * NEG-LIMIT-X * HOME-X ** * A normally closed or normally low switch should be placed between this pin and GND. ** A normally closed or normally low switch should be placed between this pin and GND, if homing operation is required. A 10 KOHM pull-up resistor is placed between all inputs and +5 VDC.
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
Y-LIMITS 9-pin DB-9, Male Connector
The Y-axis positive, negative and home switches should be connected to this port.
DESCRIPTION POS-LIMIT-Y * NEG-LIMIT-Y * HOME-Y ** * A normally closed or normally low switch should be placed between this pin and GND. ** A normally closed or normally low switch should be placed between this pin and GND, if homing operation is required. A 10 KOHM pull-up resistor is placed between all inputs and +5 VDC.
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
Z-LIMITS 9-pin DB-9, Male Connector
The Z-axis positive, negative and home switches should be connected to this port.
DESCRIPTION POS-LIMIT-Z * NEG-LIMIT-Z * HOME-Z **
A normally closed or normally low switch should be placed between this pin and GND. ** A normally closed or normally low switch should be placed between this pin and GND, if homing operation is required. A 10 KOHM pull-up resistor is placed between all inputs and +5 VDC.
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
W-LIMITS 9-pin DB-9, Male Connector
The W-axis positive, negative and home switches should be connected to this port.
DESCRIPTION POS-LIMIT-W * NEG-LIMIT-W * HOME-W ** * A normally closed or normally low switch should be placed between this pin and GND. ** A normally closed or normally low switch should be placed between this pin and GND, if homing operation is required. A 10 KOHM pull-up resistor is placed between all inputs and +5 VDC.
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
X-ENCODER 9-pin DB-9, Male Connector
The X-axis motor encoder, if available, should be connected to this port.
DESCRIPTION Y-ENCODER 9-pin DB-9, Male Connector
The Y-axis motor encoder, if available, should be connected to this port.
DESCRIPTION
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
Z-ENCODER 9-pin DB-9, Male Connector
The Z-axis motor encoder, if available, should be connected to this port.
DESCRIPTION W-ENCODER 9-pin DB-9, Male Connector
The Z-axis motor encoder, if available, should be connected to this port.
DESCRIPTION
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
RS-232 9-pin DB-9, Female Connector
This port should be connected to the RS-232 port of the host computer or PLC using the supplied cable.
DESCRIPTION DATA-XMT DATA-RCV
RESET to Controller, Should Be Set to Clear
Specifications are subject to change without notice.
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
A pilot double blinded clinical trial to compare between Tramadol HCL and Lidocaine HCL as local anaesthesia amongst hospital-outpatient adult dental attendees Mosul-Iraqi Tahani A. Alsandook, PhD. Dean of College of Dentistry/University of Mosul/Mosul/Iraq. [email protected] Yahya A. Al-Haideri, MSc. Assistant Lecturer in Oral and Maxillofacial Surgery Department /College of Dentistr
HASTA (HyperAkut STroke Alarm) Formulär Ambulans Uppgiftslämnare: Cert nr: _____________Namn: _____________________________________ Patientens namn: ______________________________________________________________ Är patienten randomiserad av SOS Alarm vid utlarmning? Ja, till HASTA Prio 1 HASTA Standard Om icke randomiserad patient med stroke-symtom uppfyller kriterier för
 Programmable Motion Control System
Programmable Motion Control System 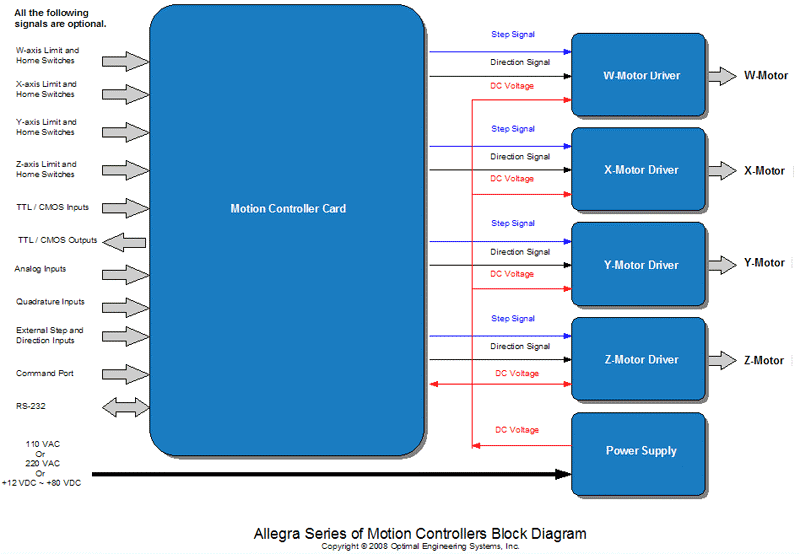 Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
PIN ASSIGNMENT AND DESCRIPTION
Copyright 2004, 2005, 2006, 2007, 2008, 2009 Optimal Engineering Systems, Inc.
PIN ASSIGNMENT AND DESCRIPTION